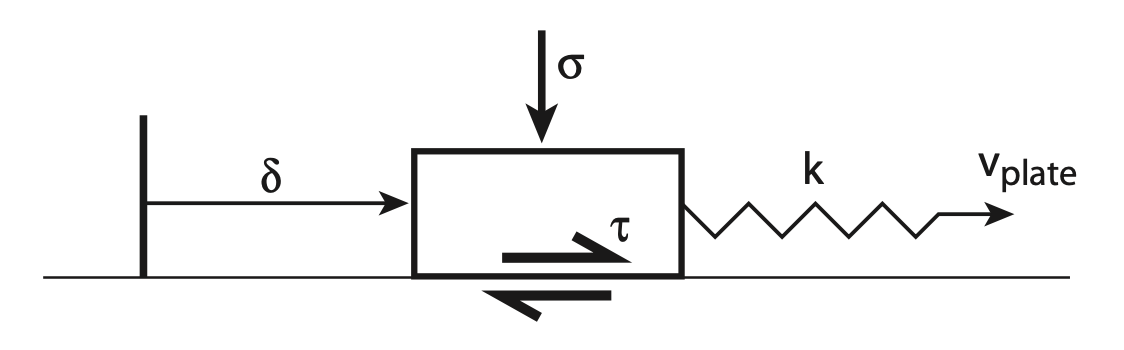
\begin{align} \tau &=\tau_0 - n V - \kappa \delta \\ η &= \frac{\mu}{2c} \\ \kappa &= \frac{2\mu}{\pi L} \\ \end{align}
$$ \tau_{lock} = \tau_0 - \kappa \delta \\ $$ $$ \tau_{str}(\delta)= \begin{cases}\tau_p-\left(\tau_p-\tau_r\right) \delta / D_c, & \delta \le D_c \\ \tau_r & \delta>D_c\end{cases} $$
\begin{align} f &= f_s - (f_s - f_d) * \min(\delta, D_c) / D_c \nonumber \\ \tau_{str} &= f \cdot σ_n \nonumber \end{align}
In [1]:
Copied!
import numpy as np
import matplotlib.pyplot as plt
from IPython.display import display, clear_output
import numpy as np
import matplotlib.pyplot as plt
from IPython.display import display, clear_output
In [2]:
Copied!
L = 1 #fault length (m)
μ = 30e3 #shear modulus (MPa)
c = 3e3 #shear wave speed (m/s)
π = np.pi
κ = 2.0 * μ / (π * L) #stiffness (MPa/m)
η = 0.5 * μ / c #radiation-damping coefficient
L = 1 #fault length (m)
μ = 30e3 #shear modulus (MPa)
c = 3e3 #shear wave speed (m/s)
π = np.pi
κ = 2.0 * μ / (π * L) #stiffness (MPa/m)
η = 0.5 * μ / c #radiation-damping coefficient
In [3]:
Copied!
fs = 0.8 #static friction coefficient
fd = 0.7 #dynamic friction coefficient
Dc = 10e-6 #slip weakening distance (m)
fs = 0.8 #static friction coefficient
fd = 0.7 #dynamic friction coefficient
Dc = 10e-6 #slip weakening distance (m)
In [4]:
Copied!
σn = 100.0 #effective normal stress (MPa)
τ0 = fs * σn #initial shear stress (MPa)
dτdt = 1e-6 #shear stress rate (MPa/s)
σn = 100.0 #effective normal stress (MPa)
τ0 = fs * σn #initial shear stress (MPa)
dτdt = 1e-6 #shear stress rate (MPa/s)
In [5]:
Copied!
δ = np.linspace(0, 2 * Dc, 100) #slip (m)
f = fs - (fs - fd) * np.minimum(δ, Dc) / Dc #slip-weakening friction
τ_str = f * σn #fault strength (MPa)
δ = np.linspace(0, 2 * Dc, 100) #slip (m)
f = fs - (fs - fd) * np.minimum(δ, Dc) / Dc #slip-weakening friction
τ_str = f * σn #fault strength (MPa)
In [6]:
Copied!
plt.figure()
plt.plot(δ, τ_str)
plt.vlines(Dc, 0, fd * σn, linestyle="--", label="Dc")
plt.legend()
plt.ylim(60)
plt.xlabel("Slip-weakening distance (δ)")
plt.ylabel("Fault strength (τ_str)")
plt.figure()
plt.plot(δ, τ_str)
plt.vlines(Dc, 0, fd * σn, linestyle="--", label="Dc")
plt.legend()
plt.ylim(60)
plt.xlabel("Slip-weakening distance (δ)")
plt.ylabel("Fault strength (τ_str)")
Out[6]:
Text(0, 0.5, 'Fault strength (τ_str)')

In [7]:
Copied!
v_max = (fs - fd) * σn / η
τ_min = fd * σn
τ_max = fs * σn
δ_max = (τ_max - τ_min) / κ
t_max = η / κ * 2.0
L_min = 2.0 * μ / π * Dc / (τ_max - τ_min)
nt = 10000
dt = 1e-7
v_max = (fs - fd) * σn / η
τ_min = fd * σn
τ_max = fs * σn
δ_max = (τ_max - τ_min) / κ
t_max = η / κ * 2.0
L_min = 2.0 * μ / π * Dc / (τ_max - τ_min)
nt = 10000
dt = 1e-7
In [8]:
Copied!
fig, ax = plt.subplots(3, 2, figsize=(8, 10))
t_hist = []
τ_hist = []
v_hist = []
δ_hist = []
δ = 0
for i in range(nt):
τ0 += dτdt * dt
Δτ = -κ * δ
τ_lock = τ0 + Δτ
f = fs - (fs - fd) * min(δ, Dc) / Dc
τ_str = f * σn
if τ_lock < τ_str:
τ = τ_lock
v = 0
else:
τ = τ_str
v = -(τ_str - τ_lock) / η
δ = δ + dt * v
t_hist.append(i * dt)
τ_hist.append(τ)
v_hist.append(v)
δ_hist.append(δ)
if i % 100 == 0:
[axi.clear() for axi in ax.ravel()]
ax[0, 0].plot(t_hist, v_hist, lw=2)
ax[0, 1].plot(t_hist, v_hist, lw=2)
ax[0, 1].set_ylim(0, v_max)
ax[0, 1].set_title("Fixed ylim")
ax[0, 0].set_ylabel("Velocity (v)")
ax[1, 0].plot(t_hist, τ_hist, lw=2)
ax[1, 1].plot(t_hist, τ_hist, lw=2)
ax[1, 1].set_ylim(τ_min, τ_max)
ax[1, 0].set_ylabel("Fault stength (τ)")
ax[2, 0].plot(t_hist, δ_hist, lw=2)
ax[2, 1].plot(t_hist, δ_hist, lw=2)
ax[2, 1].set_ylim(0, δ_max)
ax[2, 0].set_ylabel("Slip (δ)")
ax[2, 1].ticklabel_format(style="sci", axis="y", scilimits=(0, 0))
[axi.ticklabel_format(style="sci", axis="x", scilimits=(0, 0)) for axi in ax.ravel()]
ax[2, 0].set_xlabel("Time (s)")
ax[2, 1].set_xlabel("Time (s)")
display(fig)
clear_output(wait=True)
fig, ax = plt.subplots(3, 2, figsize=(8, 10))
t_hist = []
τ_hist = []
v_hist = []
δ_hist = []
δ = 0
for i in range(nt):
τ0 += dτdt * dt
Δτ = -κ * δ
τ_lock = τ0 + Δτ
f = fs - (fs - fd) * min(δ, Dc) / Dc
τ_str = f * σn
if τ_lock < τ_str:
τ = τ_lock
v = 0
else:
τ = τ_str
v = -(τ_str - τ_lock) / η
δ = δ + dt * v
t_hist.append(i * dt)
τ_hist.append(τ)
v_hist.append(v)
δ_hist.append(δ)
if i % 100 == 0:
[axi.clear() for axi in ax.ravel()]
ax[0, 0].plot(t_hist, v_hist, lw=2)
ax[0, 1].plot(t_hist, v_hist, lw=2)
ax[0, 1].set_ylim(0, v_max)
ax[0, 1].set_title("Fixed ylim")
ax[0, 0].set_ylabel("Velocity (v)")
ax[1, 0].plot(t_hist, τ_hist, lw=2)
ax[1, 1].plot(t_hist, τ_hist, lw=2)
ax[1, 1].set_ylim(τ_min, τ_max)
ax[1, 0].set_ylabel("Fault stength (τ)")
ax[2, 0].plot(t_hist, δ_hist, lw=2)
ax[2, 1].plot(t_hist, δ_hist, lw=2)
ax[2, 1].set_ylim(0, δ_max)
ax[2, 0].set_ylabel("Slip (δ)")
ax[2, 1].ticklabel_format(style="sci", axis="y", scilimits=(0, 0))
[axi.ticklabel_format(style="sci", axis="x", scilimits=(0, 0)) for axi in ax.ravel()]
ax[2, 0].set_xlabel("Time (s)")
ax[2, 1].set_xlabel("Time (s)")
display(fig)
clear_output(wait=True)
